EDLAH
2013-2015. A tablet providing to seniors all the information and support they need to live autonomously as long as possible. |

Mobile application

The EDLAH international research project consists of creating a service system for the elderly to stay autonomous as long as possible. The project is built for a tablet and offers four different services:
- Health and nutrition. This service monitors the evolution of the user's health (weight, blood pressure...). It suggests cooking recipes that are adapted to the user's profile and it also allows the user to buy online the different ingredients that are needed for the recipe.
- Social network. It has been proved that an elderly that is well integrated socially is far happier and can stay autonomous for longer. This social service allows the senior citizens to be connected with other senior citizens and their family.
- Medicine. This service helps the user take their medicine and can launch an alarm if the user forgets to take it. The desired effect or the side effects that the user feels can be stored for next time the user goes to the doctor.
- Object location. Losing objects like glasses or keys can cause a lot of stress to elderly citizens. The object location service can show to the user where an object that has been registered in the service is actually located. The indication on the object location can be done in different ways according to the user's handicap. For example the service can display the object on a map, make a sound or even guide the user vocally to the object's location.


Object locator innovation
TaM worked mainly on the object locator. The two main challenges were on the one hand to estimate precisely the distance between the user and the object in meters, and on the other hand to position the object using a trilateration algorithm applied on an indoor map thanks to indoor positioning techniques.
Distance estimation
Our goal is to provide a mobile application that helps people find their belongings, without the need of expensive infrastructure. Secondly, the set-up must be minimal and easy to use by a person without technical background. Thirdly, the technology must be accessible to everyone who owns a smart device.
Based on all these criteria, Bluetooth Low Energy was chosen. Our system uses the StickNFind beacons which can be attached to any object. Their battery lasts up to one year assuming a 30 minutes per day use.
The distance between the emitter and the receiver can be estimated using the Log Normal Shadowing model (LNS).

- Pd represents the power of the signal strength (RSSI)
- P0 is the offset (the signal strength at the reference distance d0)
- n is a coefficient characteristic to the device and the surrounding environment
- d represents the distance between the emitter and the receiver
- d0 represents the reference distance
- X is the noise added to each measurement
The parameters that should be tuned are P0 and n. These are specific to the environment and the layout of the room. Using the appropriate values of P0 and n we can estimate the distance between the receiver and the emitter, using the equation above.
Computing the distance is not just a simple estimation. The process consists of several following steps:
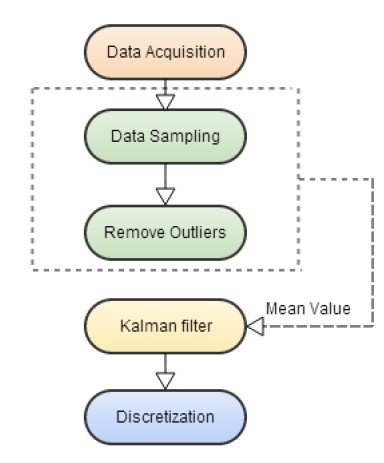
Data acquisition
The StickNFind beacons broadcast data one time per second when they are not paired with the smart device. Once paired, they broadcast every 100 milliseconds. The RSSI (Received Signal Strength Indication) value of the Bluetooth signal received by the mobile device is used for estimating the distance between the beacon and the mobile device.
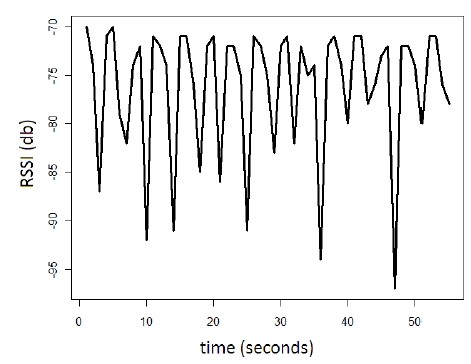
Data sampling
The Bluetooth signal is not sufficiently stable to estimate the distance based solely on one measurement. In the following figure, we show an example of different measurements of the RSSI for the same distance between the emitter and the receiver. In order to reduce the noise and attenuate the extreme values, we use a sample of ten measurements for computing the distance, instead of a single one. For every value of the distance, we use the last ten measurements to which we apply filtering techniques that are detailed below.
Outliers removal
The experiments show that the signal is very unstable. Due to noise, spikes appear in the signal which should not be taken into consideration. We remove the outliers with the help of Chebyshev Outlier Detection based on Chebyshev’s inequality. We apply the inequality for k=2, which was proven to be a good choice according to other researchers. As a consequence, 75% of the data must be in the range of maximum two times standard deviation distance from the mean value. Based on this probability, we remove all the values that fall outside the domain. The values inside the domain are used to calculate the mean value.
Filtering
We consider the mean value calculated above as the current value of the signal strength. We use the Kalman filter to get a better estimation of the distance, utilizing the history of receptions and not only the latest ones.
Discretisation
The final step is to approximate the value of the distance with the closest value from a predefined set. From a human point of view, the little variation of the value creates more difficulty in interpreting the distance. For instance, we approximate all the values between 0.76 and 1.25 to 1, all between 1.26 and 1.75 to 1.5, etc. This gives better stability to the estimated distance displayed to the user. At the same time, the little error added does not create an impediment in the process of finding the object.
Results
As a result of all the stages above in the distance estimation process, we can see in the graph the distance in meters for each sampling.
Trilateration algorithm
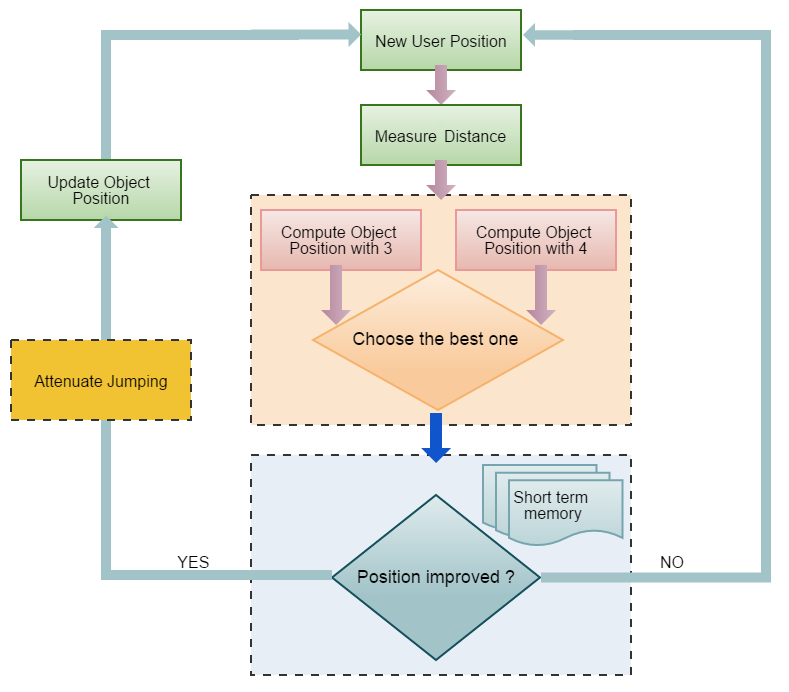
In addition to the distance estimation, we implemented a smart trilateration algorithm. The target is to let the user move in his apartment and estimate step-by-step the position of the lost object by using trilateration techniques.
Which in practice gives the following results:
Publications
- Smart Position Selection in Mobile Localisation
- Automatic Switching Between Indoor and Outdoor Position Providers
- Improving Distance Estimation in Object Localisation with Bluetooth Low Energy